Abstract
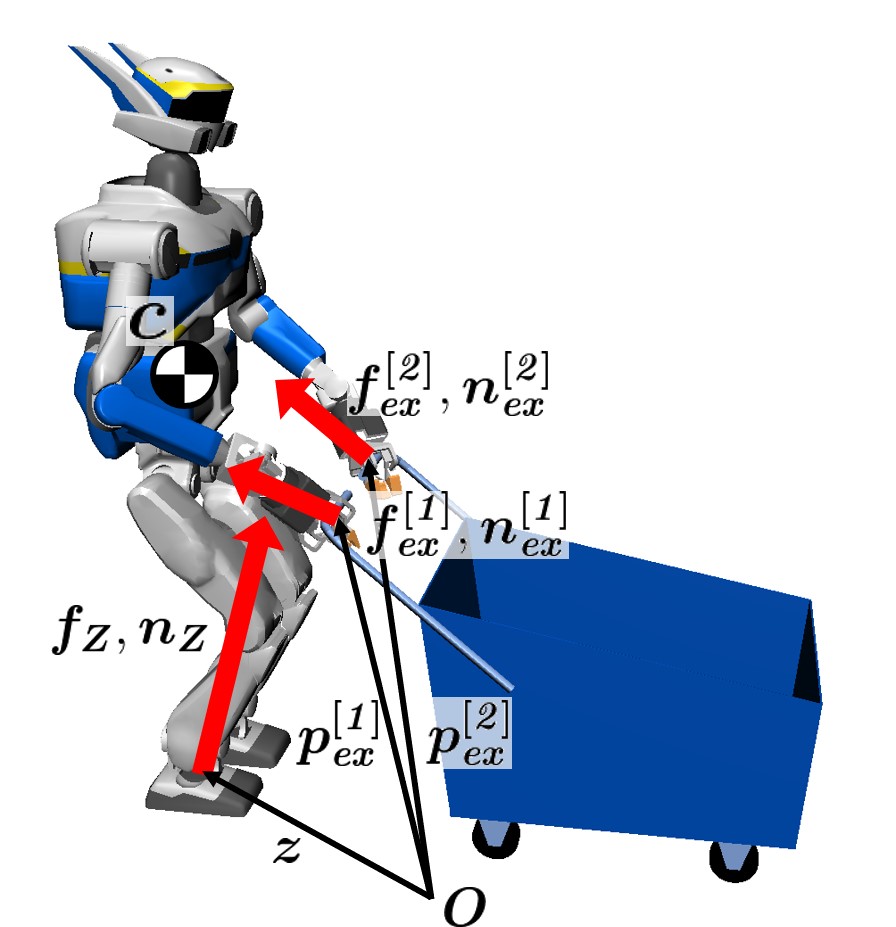
In order for a humanoid robot to perform loco-manipulation such as moving an object while walking, it is necessary to account for sustained or alternating external forces other than ground-feet reaction, resulting from humanoid-object contact interactions. We propose a bipedal control strategy for humanoid loco-manipulation that can cope with such external forces. First, the basic formulas of the bipedal dynamics, i.e., linear inverted pendulum mode and divergent component of motion, are derived, taking into account the effects of external manipulation forces. Then, we propose a pattern generator to plan center of mass trajectories consistent with the reference trajectory of the manipulation forces, and a stabilizer to compensate for the error between desired and actual manipulation forces. The effectiveness of our controller is assessed both in simulation and loco-manipulation experiments with real humanoid robots.
Methodology
We propose a control strategy, which can cope with external manipulation forces, for humanoid loco-manipulation. Specifically, we extend two control layers: the pattern generator based on the preview control and the stabilizer based on the divergent component of motion (DCM) feedback control. These control methods are based on the usual formulas of bipedal dynamics, i.e., linear inverted pendulum mode (LIPM) and DCM dynamics. By re-deriving and re-examining these key formulas taking into account external manipulation forces, the proposed control can accurately handle the following two points that were ignored in the conventional controls of humanoid loco-manipulation:
- Incorporating the effect of manipulation vertical forces without approximation in the walking pattern generation.
- Explicitly compensating for the error of manipulation forces in the stabilizer.
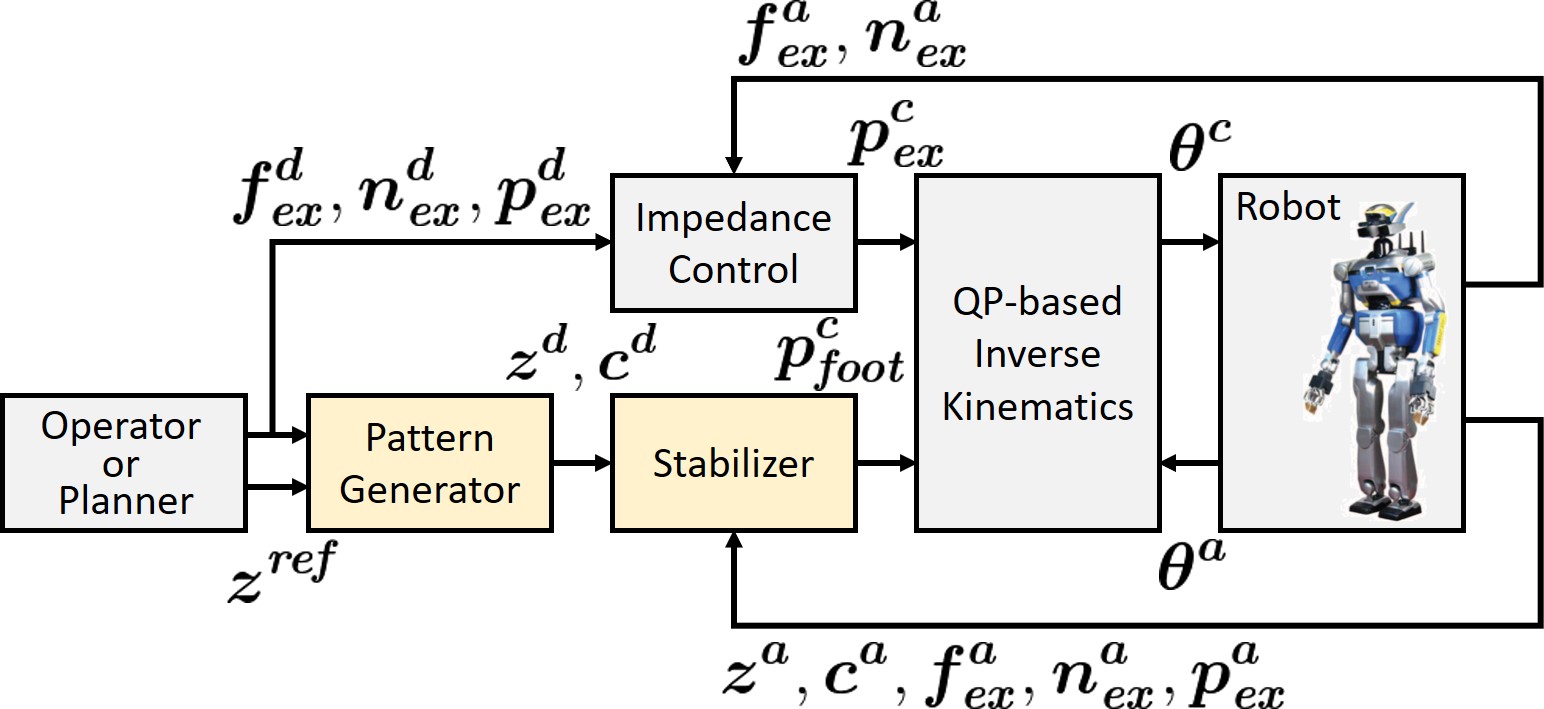
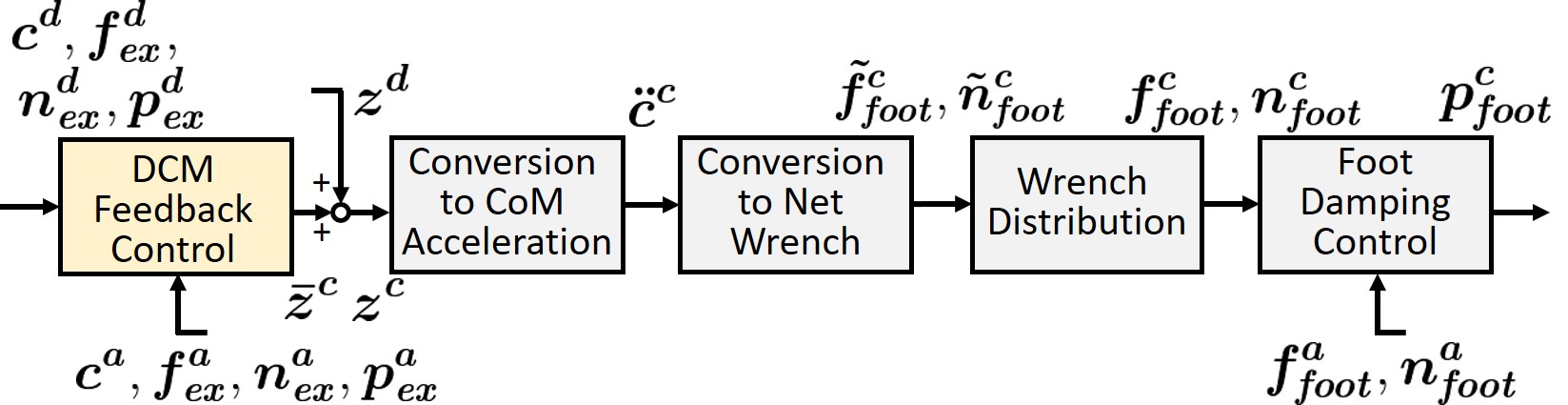
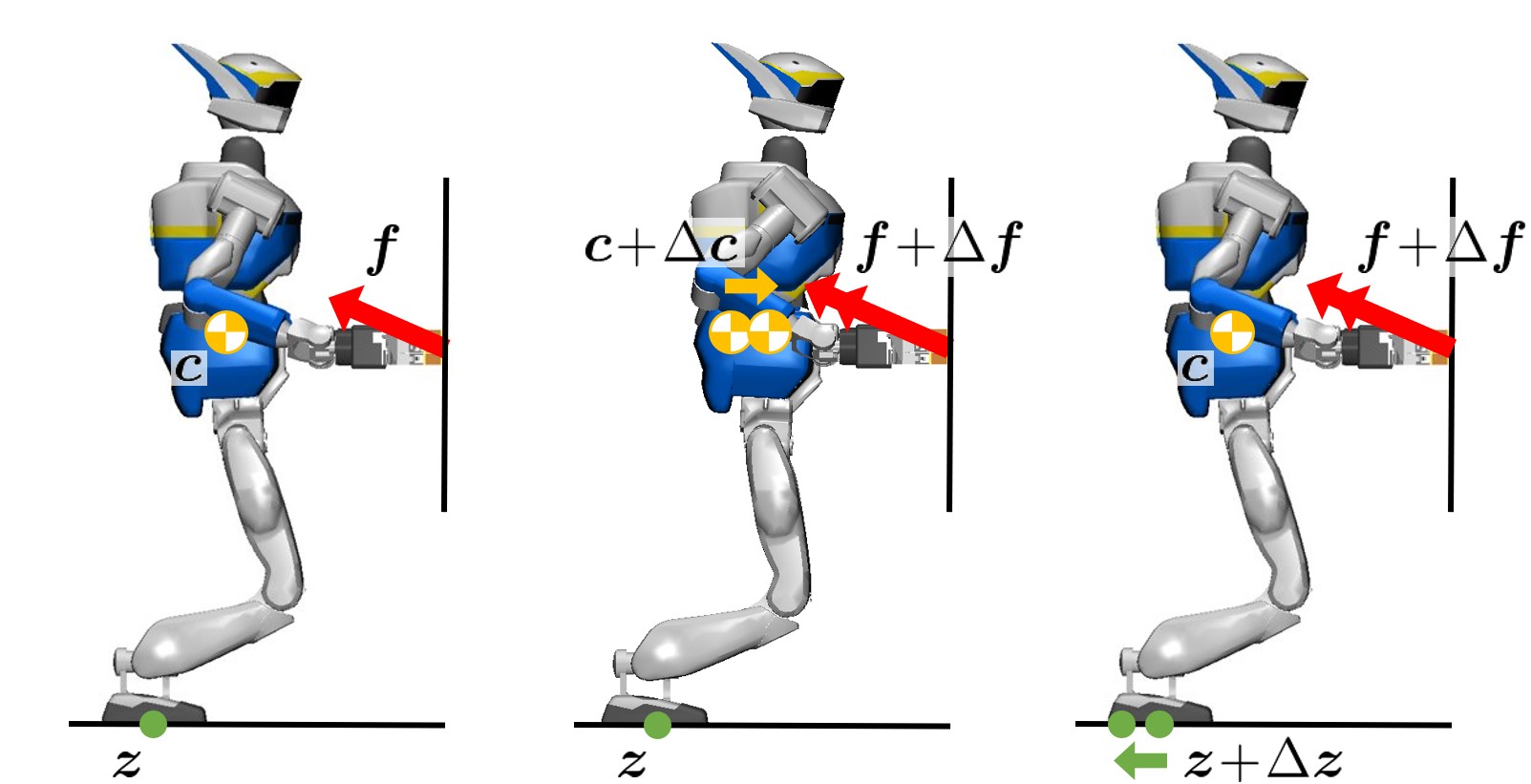
In the stabilizer's procedure, we extend "DCM Feedback Control" to account for external manipulation forces. We employ two strategies to maintain balance in response to external manipulation force errors: the CoM strategy and the ZMP strategy. The CoM strategy can handle larger errors than the ZMP strategy, which is constrained by the sole region. Conversely, the ZMP strategy can respond to errors faster compared to the CoM strategy. The latter necessitates whole-body robot motions. Our stabilizer separates the errors in the frequency domain and applies these strategies in a complementary manner.
Simulation Tests
The proposed pattern generator and stabilizer are assessed with three test cases with the dynamics simulator Choreonoid.
Simulation Experiments
With the proposed controller, the humanoid robots robustly perform loco-manipulation of large and heavy objects on floors with non-uniform friction and uneven surfaces.
Real-world Experiments
The life-size humanoid robot HRP-5P robustly transported a cylindrical object about 1.3 m in diameter and up to 140 kg in weight.
Main Video
Citation
@ARTICLE{LocomanipControl:Murooka:RAL2021,
author={Masaki Murooka and Kevin Chappellet and Arnaud Tanguy and Mehdi Benallegue and Iori Kumagai and Mitsuharu Morisawa and Fumio Kanehiro and Abderrahmane Kheddar},
journal={IEEE Robotics and Automation Letters},
title={Humanoid Loco-Manipulations Pattern Generation and Stabilization Control},
year={2021},
volume={6},
number={3},
pages={5597-5604},
doi={10.1109/LRA.2021.3077858}
}