Abstract
We propose an efficient and highly versatile loco-manipulation planning for humanoid robots. Loco-manipulation planning is a key technological brick enabling humanoid robots to autonomously perform object transportation by manipulating them. We formulate planning of the alternation and sequencing of footsteps and grasps as a graph search problem with a new transition model that allows for a flexible representation of loco-manipulation. Our transition model is quickly evaluated by relocating and switching the reachability maps depending on the motion of both the robot and object. We evaluate our approach by applying it to loco-manipulation use-cases, such as a bobbin rolling operation with regrasping, where the motion is automatically planned by our framework.
Methodology
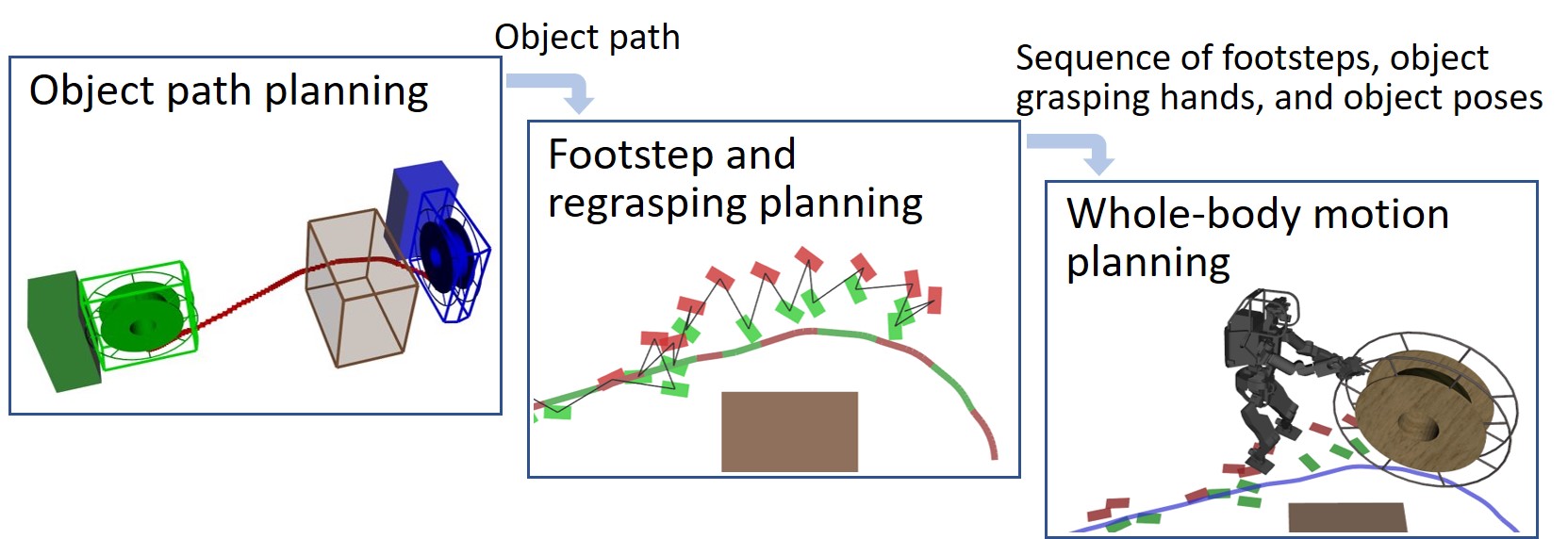
Our planning framework for humanoid loco-manipulation has the following features: (i) determining the robot and object motion while considering obstacle avoidance, (ii) stepping a foot while moving an object, (iii) regrasping an object when necessary, and finally (iv) treating objects in sliding or rolling motion in a unified manner. To make loco-manipulation planning easier to treat, we divide it into three processes: object path planning, footstep and regrasping planning, and whole-body motion planning.
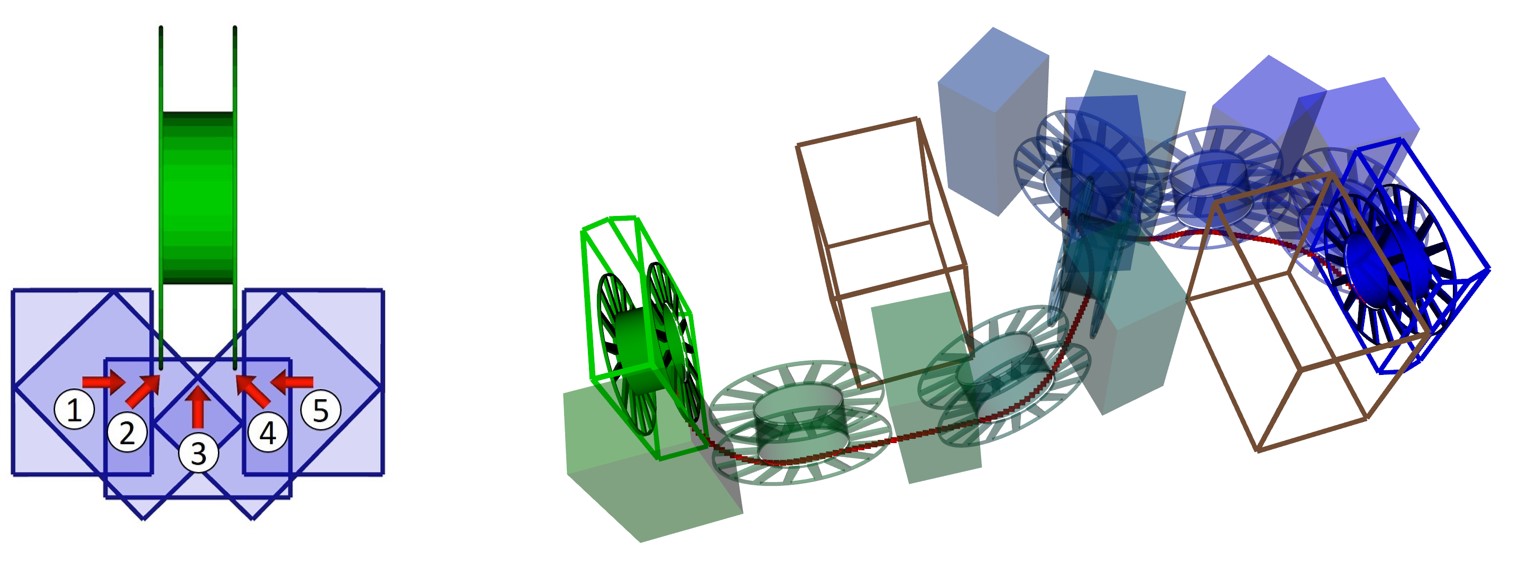
We use the asymptotically-optimal sampling-based method RRT* to plan an object path from the start to the goal. The planning state space is a compound space consisting of the object pose and the robot pose because it is necessary to consider collision avoidance with the environment not only for the object but also for the robot.
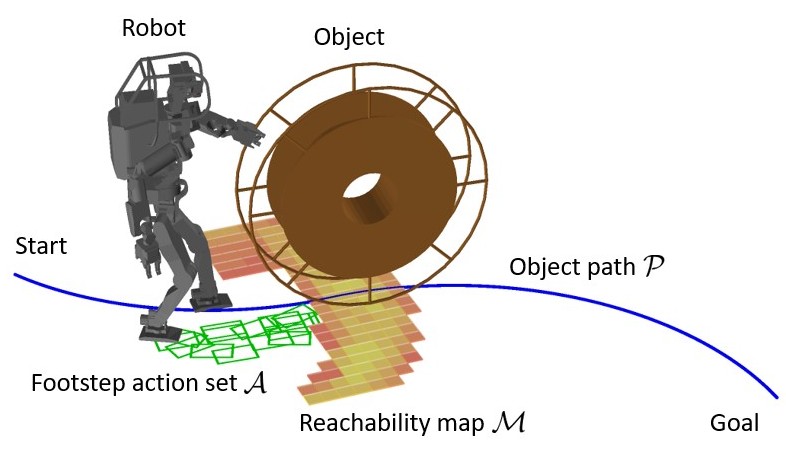
We formulate the footstep and regrasping planning as a graph path search problem that is suitable for treating discrete transition combinations. To avoid repetitive calculation of computationally expensive whole-body inverse kinematics, a pre-computed reachability map is used for the feasibility evaluation of the transition.
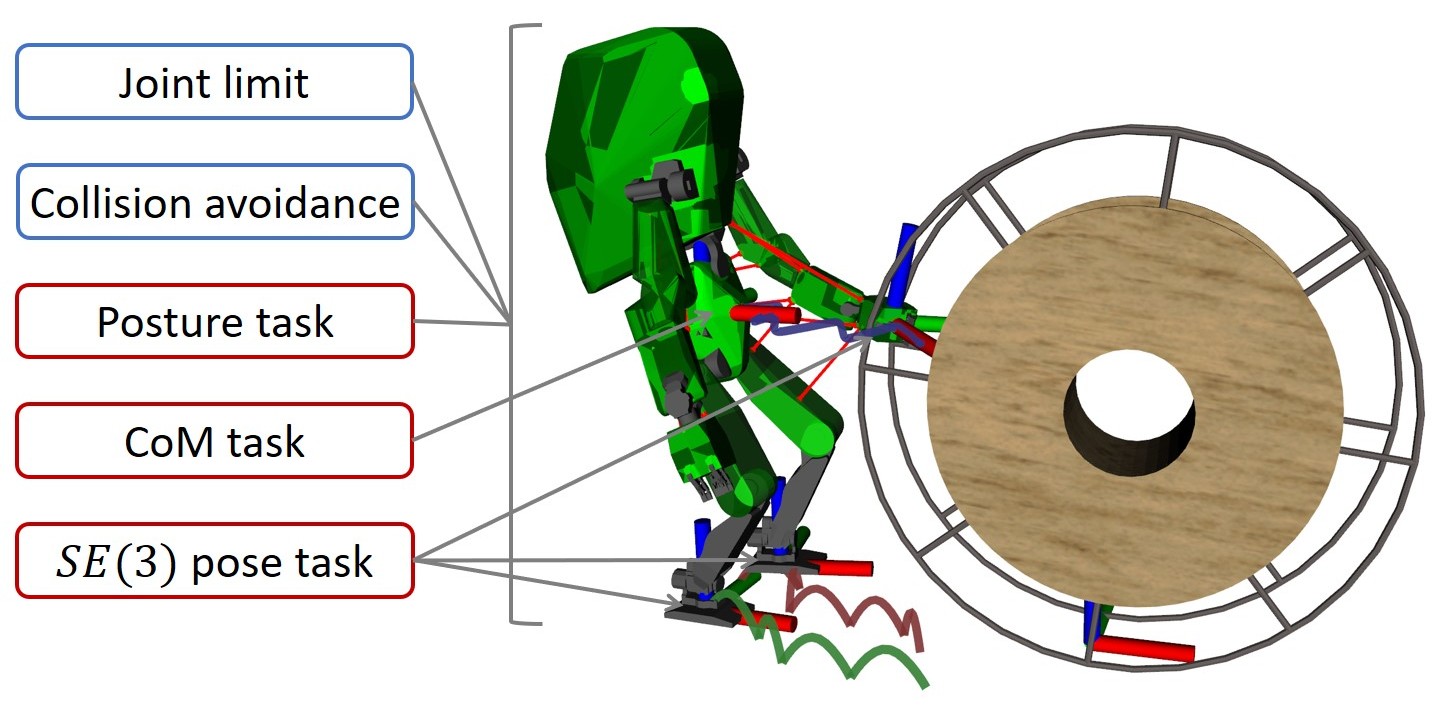
Finally, the trajectory of the whole-body joint positions is generated using inverse kinematics (IK) based on quadratic programming. The IK target consists of three types of tasks: foot and hand poses, center of mass, and overall posture.
Bobbin Rolling Task
We apply the proposed method to a task in which a humanoid robot HRP-5P automatically plans the motion of moving a large cylindrical object by rolling it, including necessary regrasping.
Door Opening Task
We also apply the method to a door-opening task with a humanoid robot HRP-2Kai. When no obstacle is present, a motion without regrasping is planned, resulting in a low-cost graph path. In contrast, when an obstacle blocks the path, the method automatically plans a motion involving a handover from the left to the right hand to avoid the obstacle.
Main Video
Citation
@ARTICLE{LocomanipPlanning:Murooka:RAL2021,
author={Masaki Murooka and Iori Kumagai and Mitsuharu Morisawa and Fumio Kanehiro and Abderrahmane Kheddar},
journal={IEEE Robotics and Automation Letters},
title={Humanoid Loco-Manipulation Planning Based on Graph Search and Reachability Maps},
year={2021},
volume={6},
number={2},
pages={1840-1847},
doi={10.1109/LRA.2021.3060728}
}