Abstract
Multi-contact motion is important for humanoid robots to work in various environments. We propose a centroidal online trajectory generation and stabilization control for humanoid dynamic multi-contact motion. The proposed method features the drastic reduction of the computational cost by using preview control instead of the conventional model predictive control that considers the constraints of all sample times. By combining preview control with centroidal state feedback for robustness to disturbances and wrench distribution for satisfying contact constraints, we show that the robot can stably perform a variety of multi-contact motions through simulation experiments.
Methodology
We propose the centroidal online trajectory generation method based on preview control and the stabilization control method to compensate for the error of the centroidal state.
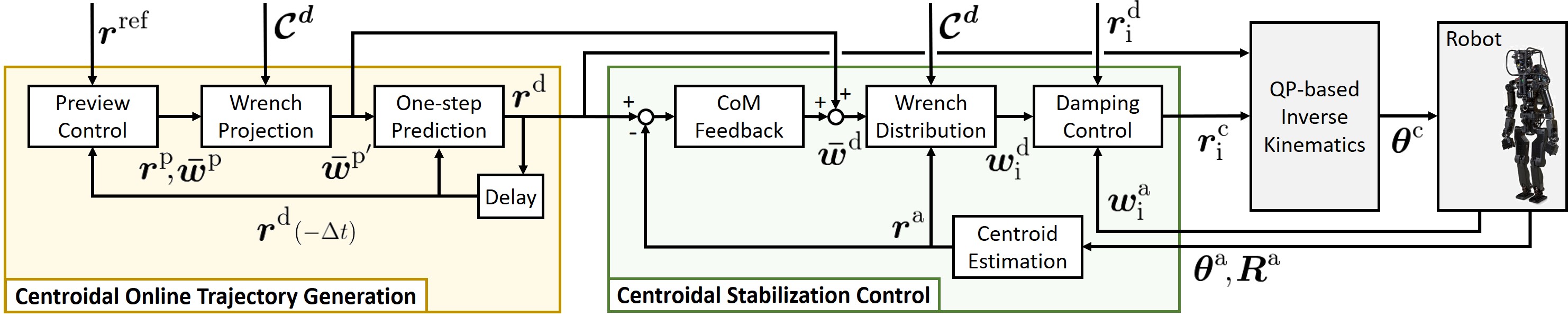
We use preview control, which does not explicitly consider these constraints, for trajectory generation. Since the preview control requires only a single matrix multiplication at runtime and does not require an iterative computation, it is considerably faster than model predictive control (MPC), which requires solving a quadratic programming (QP) problem. We show that even though the constraints are omitted in the preview control, a realistic reference trajectory (but a fairly rough one that is discontinuous and non-differentiable) and post-processing wrench projection can generate feasible robot motions.
Simulation Experiments
We verified various multi-contact motions of the humanoid robots HRP-5P and HRP-2Kai on the dynamics simulator Choreonoid. Our method can sequentially generate the centroidal trajectory with stabilization control within 1 ms, considering the reference input of the horizon of 2 s (400 sample points); to the best of our knowledge, this is one of the fastest centroidal trajectory generation and control methods that can handle general multi-contact motion without relying on the biped-specific dynamics.
Real-world Experiments
We demonstrated that the life-size humanoid robot HRP-5P can perform stable multi-contact locomotion on inclined terrain.
Main Video
Citation
@ARTICLE{MultiContactPreviewControl:Murooka:RAL2022,
author={Masaki Murooka and Mitsuharu Morisawa and Fumio Kanehiro},
journal={IEEE Robotics and Automation Letters},
title={Centroidal Trajectory Generation and Stabilization Based on Preview Control for Humanoid Multi-contact Motion},
year={2022},
volume={7},
number={3},
pages={8225-8232}
doi={10.1109/LRA.2022.3186515}
}