Abstract
Whole-body contact is an effective strategy for improving the stability and efficiency of the motion of robots. For robots to automatically perform such motions, we propose a posture generation method that employs all available surfaces of the robot links. By representing the contact point on the body surface by two-dimensional configuration variables, the joint positions and contact points are simultaneously determined through a gradient-based optimization. By generating motions with the proposed method, we present experiments in which robots manipulate objects effectively utilizing whole-body contact.
Methodology
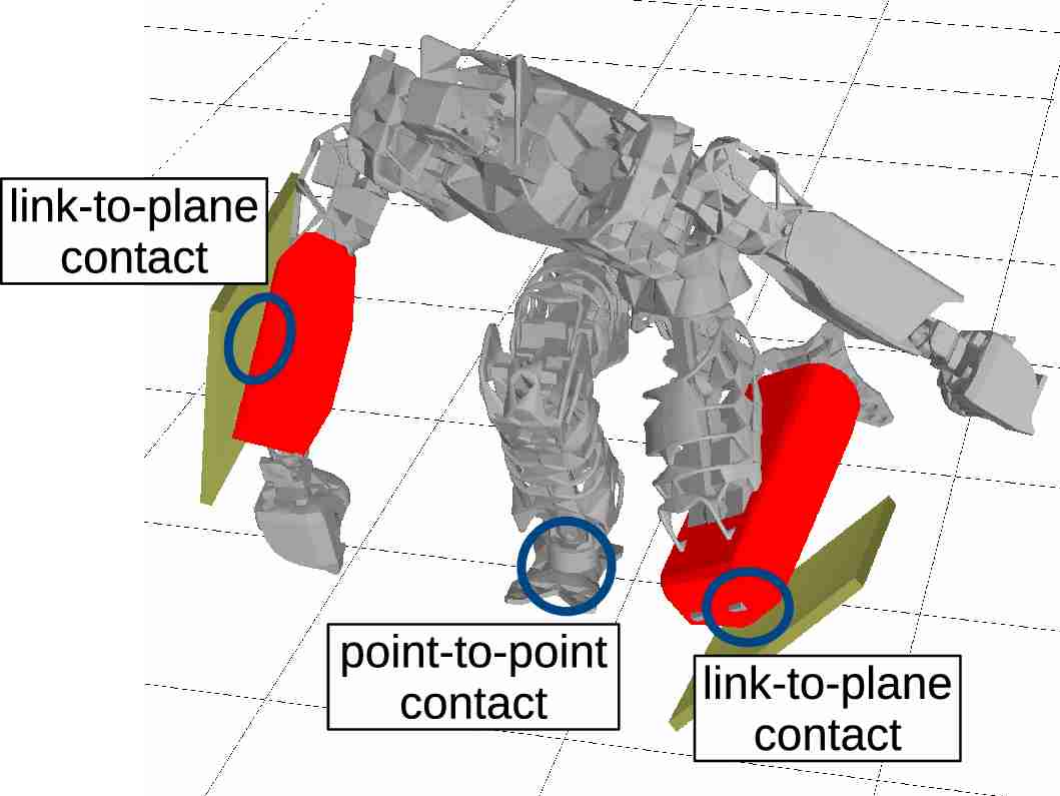
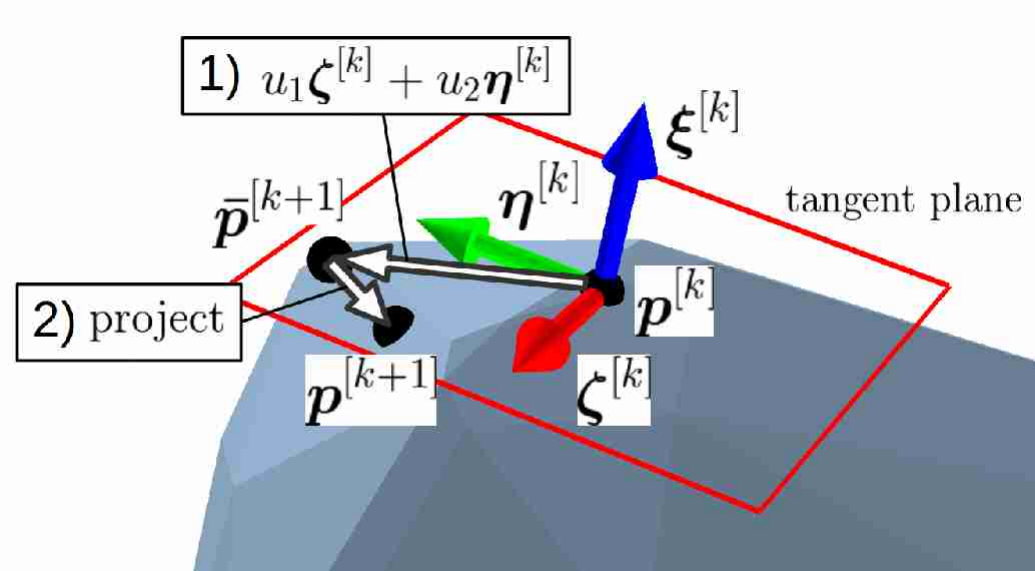
Our posture generator automatically determines contact points and generates robot postures by specifying which body parts of the robot and environment should be in contact. To achieve this, we extend the conventional inverse kinematics formulation by incorporating updates of contact points on the tangent plane and their projection onto the body surface into the iterative optimization process.
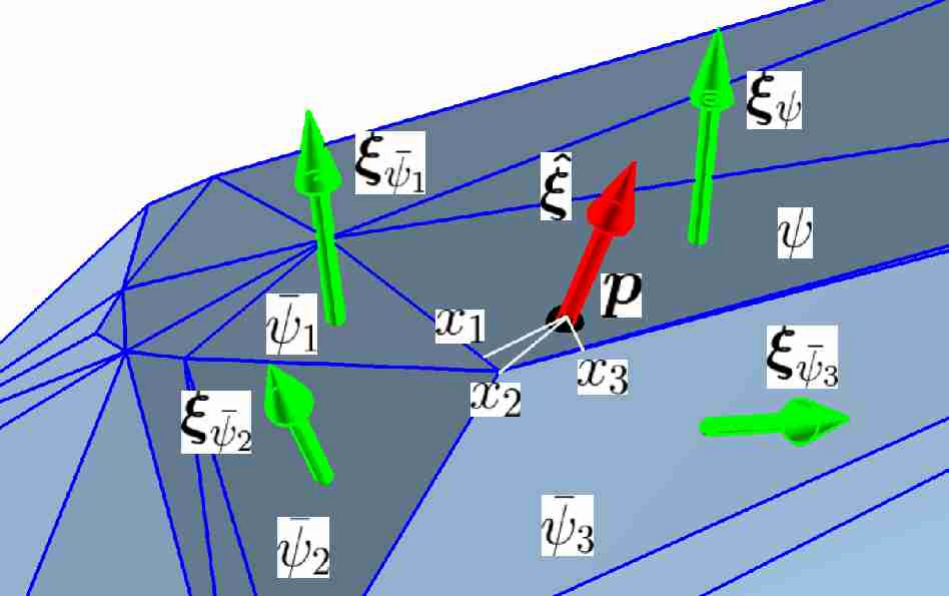
In gradient-based optimization, it is desirable for the objective function to be differentiable. To avoid non-smooth changes in the tangent plane at contact points on the body surface, we interpolate the surface normal vectors smoothly.
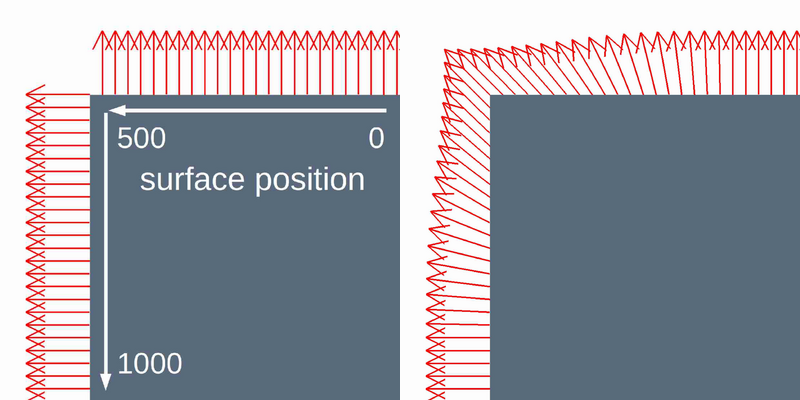
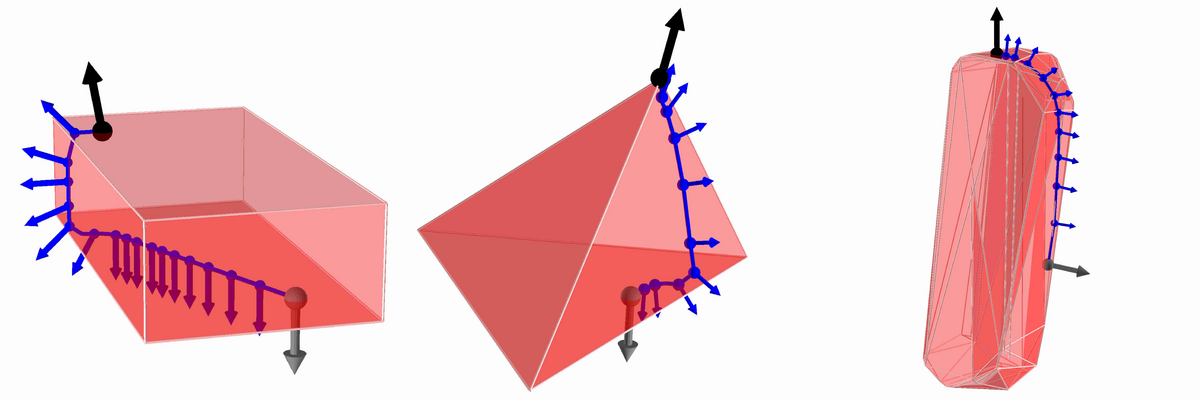
We verified that our gradient-based optimization can find the contact point that minimizes the objective function on various body surfaces, including primitive and mesh-based 3D shapes.
Experiments
We generated a whole-body manipulation posture where the mobile manipulator PR2 holds a box-shaped object using six contact points on both arms. Even for objects that are difficult to grasp due to insufficient fingertip friction, stable holding is achieved by utilizing arm surface contacts.
The proposed method is also effective for non-prehensile manipulation, where the object is not fully grasped. As an example, the humanoid robot RHP4B tilts a large board from a kneeling posture, using support from both the environment and its own body.
The proposed method also enables motion planning for manipulators with an attached 3D body, allowing contact with a target position at any point on its surface.
Main Video
Citation
@ARTICLE{WholebodyContactOptimization:Murooka:RAL2020,
author={Masaki Murooka and Kei Okada and Masayuki Inaba},
journal={IEEE Robotics and Automation Letters},
title={Optimization-Based Posture Generation for Whole-Body Contact Motion by Contact Point Search on the Body Surface},
year={2020},
volume={5},
number={2},
pages={2905-2912},
doi={10.1109/LRA.2020.2974689}
}