Abstract
To enable humanoid robots to work robustly in confined environments, multi-contact motion that makes contacts not only at extremities, such as hands and feet, but also at intermediate areas of the limbs, such as knees and elbows, is essential. We develop a method to realize such whole-body multi-contact motion involving contacts at intermediate areas by a humanoid robot. Deformable sheet-shaped distributed tactile sensors are mounted on the surface of the robot's limbs to measure the contact force without significantly changing the robot body shape. The multi-contact motion controller developed earlier, which is dedicated to contact at extremities, is extended to handle contact at intermediate areas, and the robot motion is stabilized by feedback control using not only force/torque sensors but also distributed tactile sensors. Through verification on dynamics simulations, we show that the developed tactile feedback improves the stability of whole-body multi-contact motion against disturbances and environmental errors. Furthermore, the life-sized humanoid RHP Kaleido demonstrates whole-body multi-contact motions, such as stepping forward while supporting the body with forearm contact and balancing in a sitting posture with thigh contacts.
Methodology
We extend our previous humanoid multi-contact controller by enhancing modules for centroidal control and limb control to adapt to whole-body contact based on tactile sensors. In our control system, distributed tactile sensors are used to obtain the contact region for centroidal planning and wrench distribution, and to obtain the contact wrench for damping control.
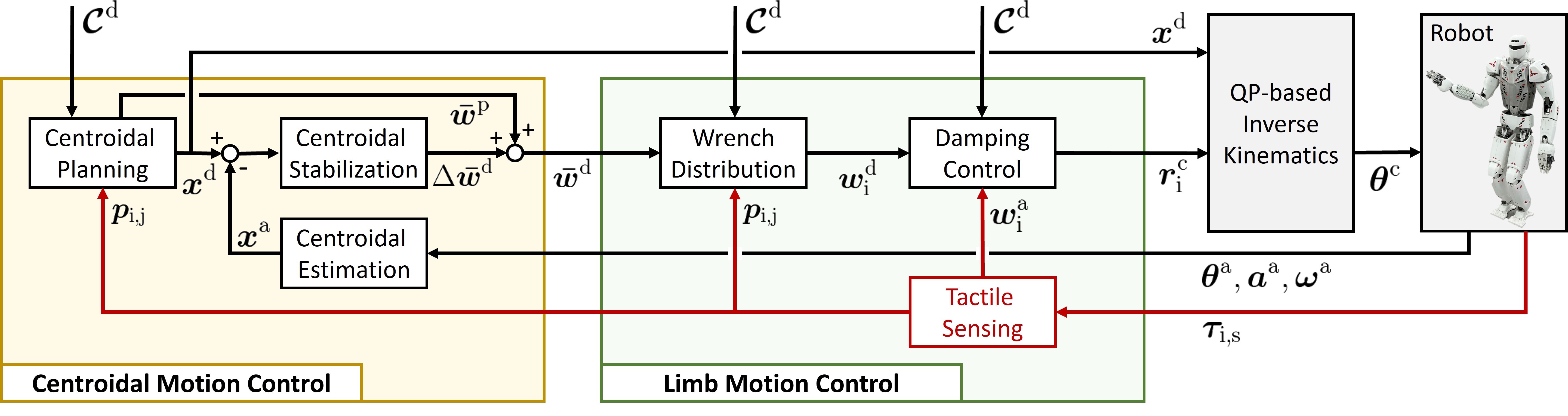
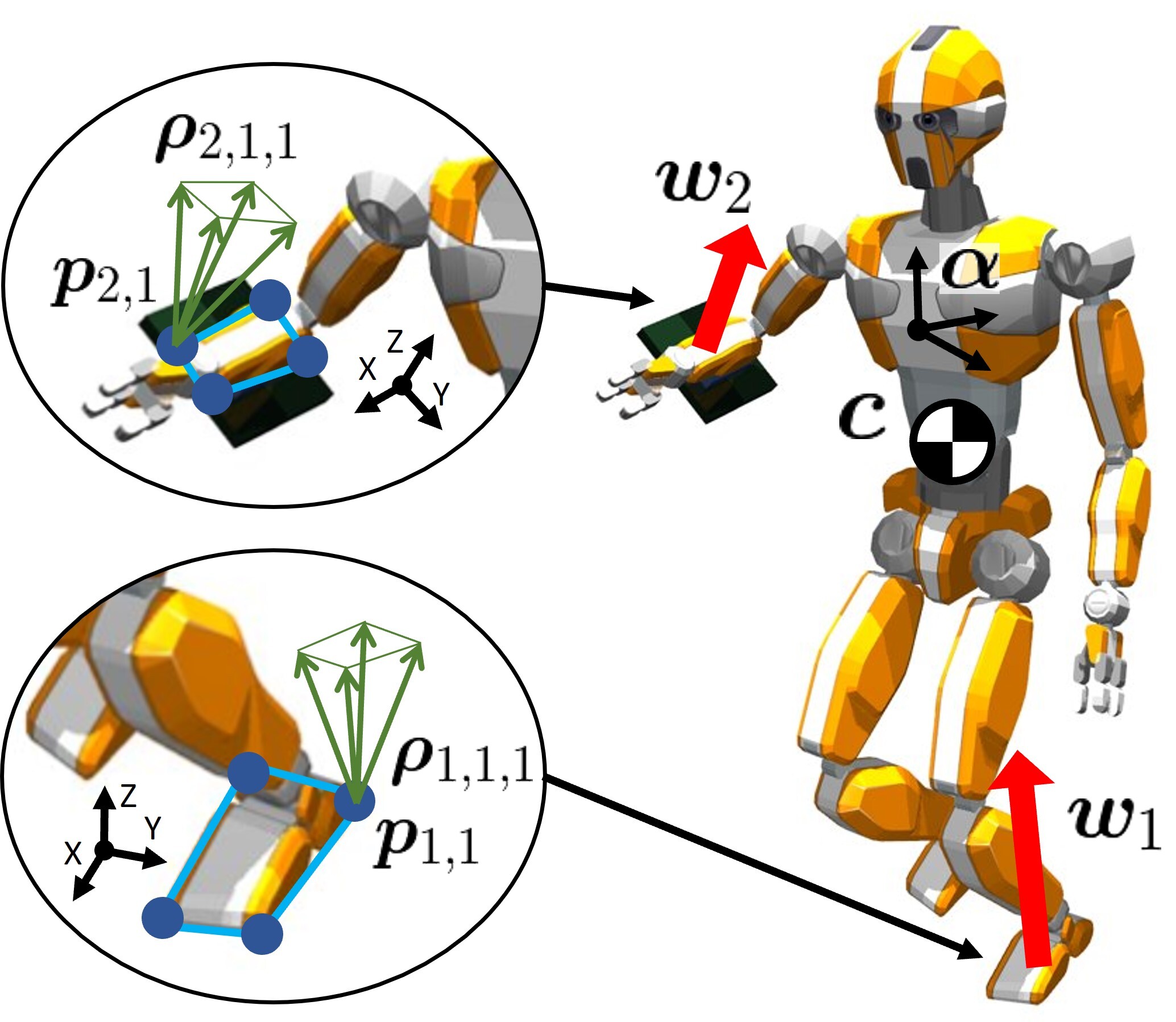
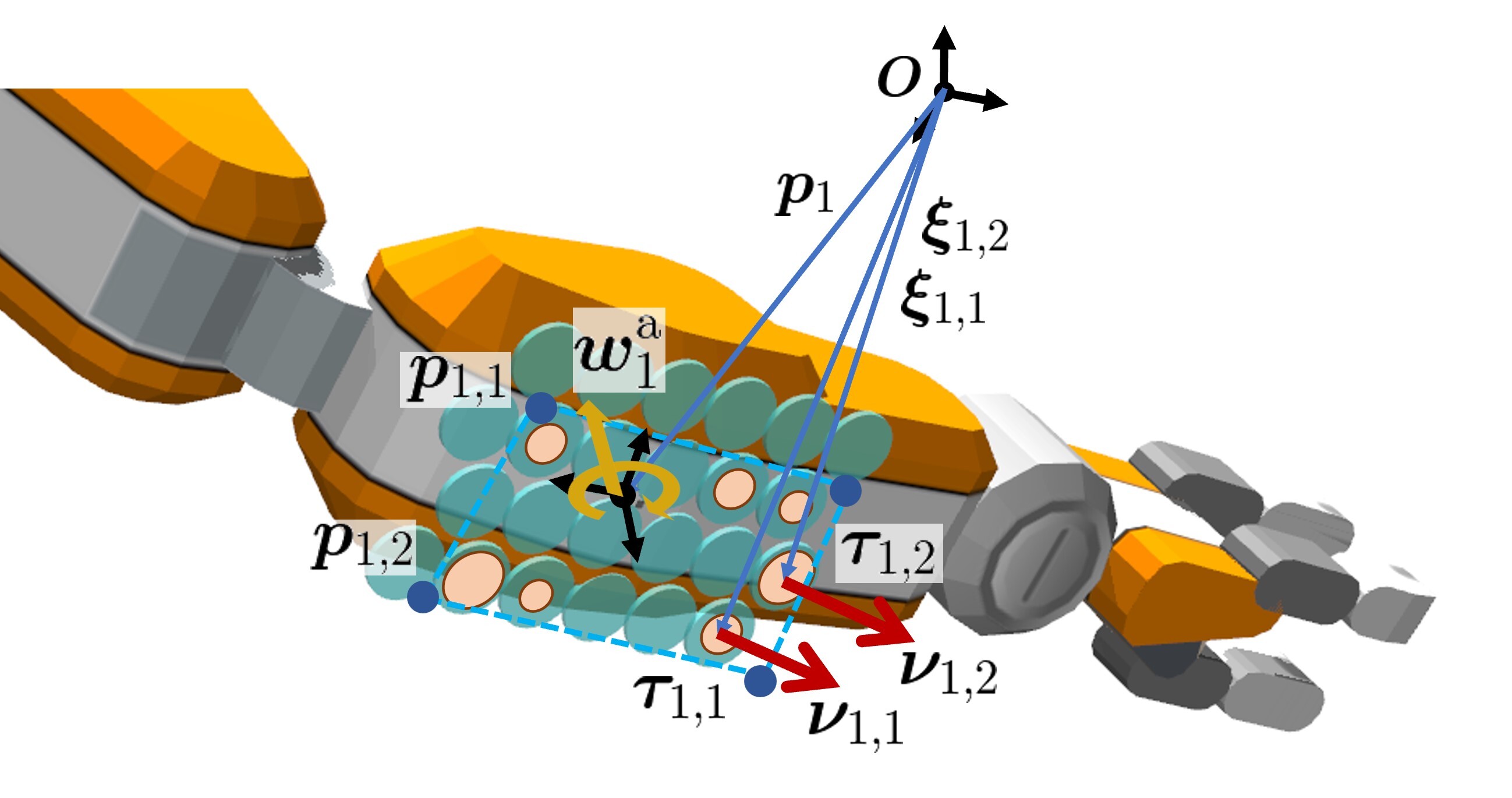
We apply model predictive control (MPC) to track a reference centroidal trajectory of a humanoid robot under multiple three-dimensional contacts, taking into account centroidal dynamics and contact wrench constraints. In parallel, damping control is applied to ensure that the contact wrenches at each limb follow their target values, based on feedback from the contact wrenches computed using distributed tactile sensors.
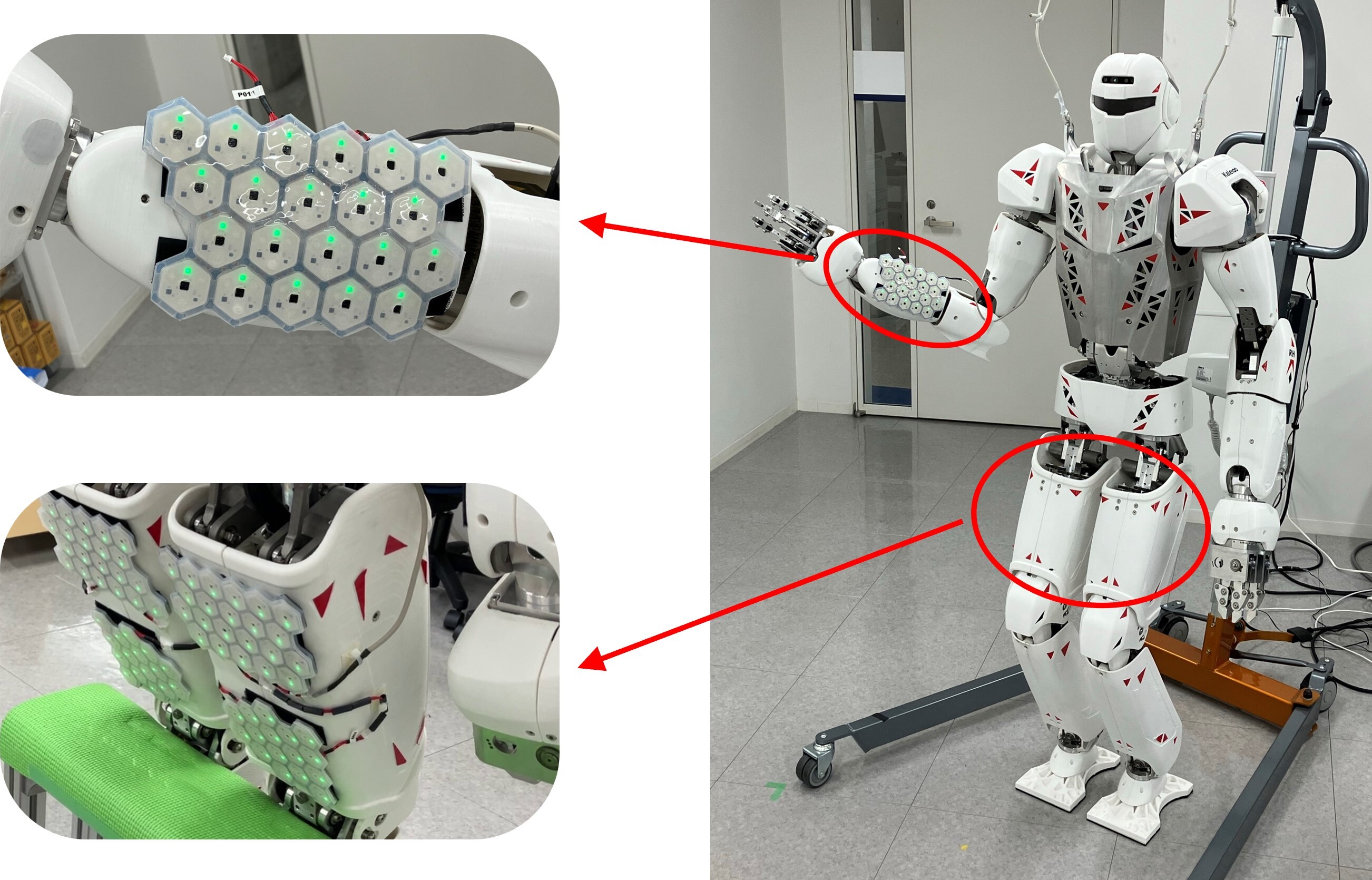
We mounted distributed tactile sensors e-skin from intouch-robotics on one forearm and both thighs of RHP Kaleido, a life-sized humanoid robot developed by Kawasaki Heavy Industry. E-skin is a deformable sheet of sensors about 5 mm thick that can be easily mounted on the surface of robot links. The e-skin patches on the robot consist of 21 and 75 hexagonal-shaped cells in the forearm and both thighs, respectively. Each cell is equipped with sensors that can measure tactile intensity in the normal direction, proximity, and acceleration.
Simulation Experiments
We verified various whole-body multi-contact motions by the virtual humanoid robot JVRC1 in the dynamics simulator MuJoCo. To simulate distributed tactile sensors mounted on the robot, we implemented a dedicated plugin for MuJoCo.
Real-world Experiments
We demonstrated that the life-sized humanoid RHP Kaleido, equipped with distributed tactile sensors e-skin, can perform whole-body multi-contact motions such as stepping forward while supporting the body with the forearm and keeping balance in a sitting posture with thigh contacts by the developed method.
Main Video
Citation
@ARTICLE{TactileMultiContact:Murooka:RAL2024,
author={Masaki Murooka and Kensuke Fukumitsu and Marwan Hamze and Mitsuharu Morisawa and Hiroshi Kaminaga and Fumio Kanehiro and Eiichi Yoshida},
journal={IEEE Robotics and Automation Letters},
title={Whole-Body Multi-Contact Motion Control for Humanoid Robots Based on Distributed Tactile Sensors},
year={2024},
volume={9},
number={11},
pages={10620-10627},
doi={10.1109/LRA.2024.3475052}
}